Pedestrian Collision Avoidance System (Team 1)
A prototype designed to take you through scenarios our system encounters.
About
This site introduces 10 different scenarios that are demonstrated in the PCAS prototype. These scenarios were given to us by the customer and are detailed in separate cases, to the right, including a description and demonstration of each scenario and how the PCAS system will react to the scenario. All of the scenarios have some consistencies with both the autonomous vehicle and the pedestrian.
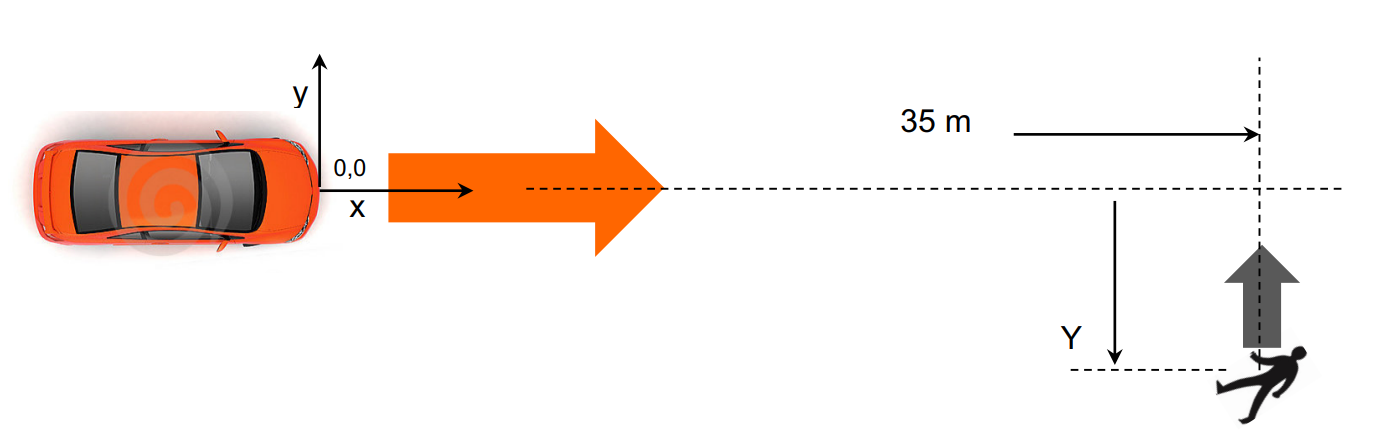
The autonomous vehicle in all scenarios will have an initial steady state velocity that is controllable with the brake by wire system. It will always be heading straight along the +x axis and it will always start at the origin(0,0). The pedestrian will always have a static or constant speed in a direction parallel to the y axis. Their initial position will always be (35,7).
Case One
Includes scenarios 1-4, in which the pedestrian is moving and then stops.
Case Two
Includes scenarios 5-7, in which the pedestrian is static and then moves.
Case Three
Includes scenarios 8-10, in which the pedestrian is always static.